この記事では、関節副運動テストや関節モビライゼーション時に活用される「静止肢位」「現在の静止肢位」「治療肢位」について記載していく。
この記事を観覧してもらえば、関節可動域運動における自動運動と他動運動の違いも整理できるのではと思う。
静止肢位とは
静止肢位とは、要するに「LPP(最大緩み肢位)」のことである。
じゃあ「LPPと表現すれば良いではないか?」と思われるかもしれないが、その意見に関して特に反論はない。
特定の学派が、この用語を用いていて、他の用語とも整合性が取れるので「静止肢位」と表現しているに過ぎない。
静止肢位(=LPP・最大緩み肢位)は以下を参照。
⇒『関節のLPPとCPP』
※文献によって若干の違いあり
静止肢位の特徴は以下となる。
- 関節副運動が最も大きい
- 関節面間隙が最も大きい
- 軟部組織が最も緩んでいる
現在の静止肢位とは
「現在の静止肢位」とは、痛みが最も少ない安楽な肢位を指す。
疼痛の程度が強い場合は、筋ガーディング(防御性の筋収縮)が起こりやすい。
従って、関節モビライゼーションを実施する際は、安楽な肢位(=筋ガーディングなどが低減される肢位)」である「現在の静止肢位」を選択する場合がある。
そして、「現在の静止肢位」は必ずしも「静止肢位(=LPP)」とは限らない。
例えば、肩関節の静止肢位は「55°外転・30°水平内転 」だが、「現在の静止肢位」は肩関節軽度屈曲・内転・内旋位(上肢を対側へ密着させた肢位)かもしれない。
「痛みが強くて、安楽な姿勢など無い。少し動かされただけで痛い」などの場合は、関節モビライゼーションが非適用な可能性も出てくる。
※実施するなら低いグレードであったり、軽微な振幅刺激を利用。
これらの線引きはアート的な要素であり、臨床経験を積むことで「何となく」分かってくるが、一つの指標として「イリタビリティーの概念」もヒントとなるかもしれない。
関連記事⇒『イリタビリティーチェックで重症度を確認しよう!』
また、荷重関節であれば「荷重位では痛いが、非荷重位なら痛くない」といったことも起こる。
そんなケースへ(非荷重位での)関節モビライゼーションを施行する際は、どの様な関節角度でも構わない(対象者がリラックス出来て、セラピストが把持し易い角度を選択)。
※最大緩みの位置という観点であれば「静止肢位」を選択。
※鎮痛目的であればカルテンボーンのグレード1~2の牽引や滑りを用いる。
※「非荷重位では痛みが無い」と表現していても、施行時に「何らかの好反応(例えば主観的な反応など)」が得られることもある。
※「非荷重位でアプローチして、ベースラインである荷重位での症状にも変化が起こっている」なら更に良い。
※ただし、即自的効果が得られたとしても対処療法的な場合が多いので、もっと広い視野で理学療法を実施していく前処置としての意味合いで用いる場合も多い。
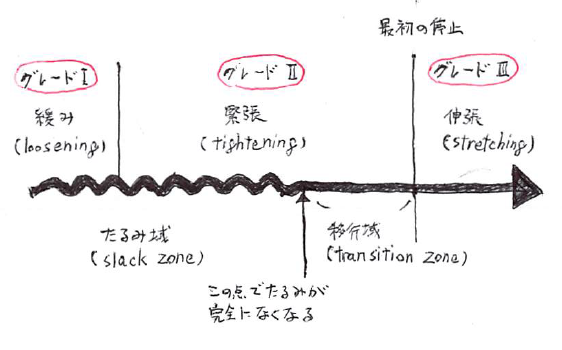
グレード2までの並進運動は「鎮痛手技」に該当し、関節モビライゼーションと呼ばない。
つまりグレード2までの並進運動は「(単なる)滑り手技」「離開手技」と表現する。
一方で、グレード3の並進運動は「関節モビライゼーション(滑りモビライゼーション・離開モビライゼーションなど)」と表現する。
カルテンボーンのグレードは以下を参照
自動運動・他動運動とは
次に治療肢位について述べていくが、その前に(治療肢位を考えるうえで重要な)「自動運動」「他動運動」について記載しておく。
他動関節可動域運動(他動運動)とは
・他動運動(passive ROM exercise)は、患者の筋収縮を伴わず他動的に関節を動かす運動を指す。
・解剖学的運動と呼ばれることがある。
・他動運動の最終域を解剖学的制限と呼ぶことがある。
・患者の関節可動域以上に動かす場合を「伸張運動(ストレッチング)」と分けて表現する場合もあるが、一般的にはストレッチングも他動的に行えば「他動関節可動域運動」に入る。
自動関節可動域運動(自動運動)とは
・自動運動(active ROM exercise)は、患者の随意的な筋収縮によって関節を動かす運動を指す。
・生理学的運動とも呼ばれる。
・自動運動の最終域を生理学的制限と呼ぶことがある。
・生理学的制限(自動運動)は解剖学的制限(他動運動)より早く生じる。
・すなわち、自動運動は、一般的に他動運動よりもわずかに可動域が小さいことが多い。
自動運動と他動運動の間には弾性域がある
前述したように自動運動最終域(生理学的制限)と他動運動最終域(解剖学的制限)の間には差があり、この差を「弾性域」と呼ぶ。
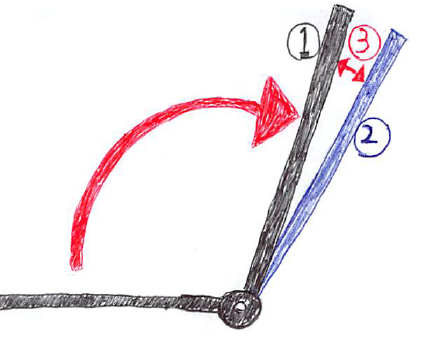
①⇒自動運動最終域(生理学的制限)
②⇒他動運動最終域(解剖学的制限)
③⇒弾性域
※①の自動運動最終域=治療肢位
治療肢位とは
「治療肢位」とは自動運動最終域でのポジショニングを指す(上記の図を参照)。
※自動運動最終域~他動運動最終域までの間を「弾性領域」と呼び、この間にエンドフィールがある。
関連記事⇒『エンドフィール』
※この解釈には諸説あり。
そして、自動運動最終域から更に他動的に稼働した際のエンドフィールが関節原性(な中で、靭帯・関節包などの関節周囲組織が関与した制限)であれば関節モビライゼーションを施行する。
※治療肢位は関節モビライゼーションを施行するだけでなく、ジョイントプレイテストを施行する肢位でもある。
関連記事
⇒『関節副運動を補足します』
筋原性であれば、筋に対するアプローチ(PIRやストレッチングなど)とも組み合わせながら関節モビライゼーションを実施することもある。
自動運動の最終域で関節モビライゼーションを実施するということは、「最終可動域ではあるが、(弾性域という)若干の余裕を残した状態」であるため、関節を痛めるといったリスクを予防できたりもする。
特に最終可動域(付近)での滑りモビライゼーションは関節を痛めるリスクがあるため、「治療肢位(自動運動の最終域)」というのは重要なポイントとなる。
※例えば肩甲上腕関節など
また、どうしても「治療肢位より他動運動最終域に近いポジショニング」を取らなければならない場合は、軽く離開を加えた状態で滑りモビライゼーションを実施するなどの工夫をしても良いかもしれない。
ちなみに学派によっては、可動域改善目的の関節モビライゼーションとして、初学者には「治療肢位での滑りモビライゼーション」よりも、「静止肢位での離開モビライゼーション」を推奨している場合もある。
※前述したように関節を痛めるリスクを避けるため
最後に、治療肢位の補足として「わざわざ患者に自動運動最終域まで動かしてもらって、そこで療法士が保持する」と杓子定規に解釈する必要は無い点は付け加えておく(ただし、その方が良い場合もある。要は全てを原則に当てはめなくとも良いという意味)。
例えば、他動運動最終域まで療法士が動かして、「そこから少し戻した肢位」を治療肢位と解釈したほうが、効率的なので臨床向きと言える。
また、関節モビライゼーションで関節副運動の改善がみられた場合において、「他動運動における関節可動域の改善」がみられても、「自動運動における可動域には変化が見られない」ということは起こってくる。
しかし、それでは「新しく得られた可動域=機能的な可動域」とは言いにくい。
従って、「新たに得られた可動域内での運動」を実施することで、「自動運動・他動運動最終域の差」をの2つの可動最終域に差があることは、「その可動域獲得が機能的か」という側面も重要となる。
すなわち、「他動運動の可動域は改善したが、自動運動の可動域には変化が見られない(自動・他動可動域に差が出ている)といった場合は、得られた可動域でのトレーニングという観点が必要となってくる。
ちなみにPNFのホールドリラックスなども他動運動最終域から少し戻した状態で施行することを推奨しているが、これも同様な解釈によるものである(ホールドリラックスの場合は、筋線維を傷めないための配慮であるが、「傷めないように」という点で関節モビライゼーションと共通している)。
関連記事
「静止肢位」と「現在の静止肢位」と「治療肢位」の使い分け
「静止肢位」「現在の静止肢位」「治療肢位」は以下のような使い分けをする
静止肢位
・関節副運動テストにて左右差の比較
・関節モビライゼーション(グレー3での離開手技)
※滑り手技は治療肢位で実施
現在の静止肢位
・鎮痛手技(グレード1~2の範囲での滑り・離開手技)
治療肢位
・関節副運動テスト
・鎮痛手技(グレード1~2の範囲での滑り・離開手技)
・関節モビライゼーション(グレード3での滑り・離開手技)
重複するが、これらの肢位を臨床で杓子定規に当てはめず、臨機応変に対処してもらって構わない。
ただし、最初から「臨機応変」と言われても初学者は戸惑うし、そういう初学者に対する「一つの指標」として、「静止肢位」「現在の静止肢位」「治療肢位」の概念は有効に機能するのではないだろうか?
関連記事
関節モビライゼーションに関しては以下の記事でも包括的に解説しているので、こちらも参考にしてみてほしい。
※ここに記載されている「静止肢位」「現在の静止肢位」「治療肢位」をを踏まえた上で、リンク先で紹介されている「四肢関節のモビライゼーション」を観覧してもらえれば、理解度はグッと上がると思う。
モビライゼーションとは!定義/適応・禁忌/方法を紹介
また、一般的なROMテスト(他動運動による関節可動域検査)については以下にまとめているので、学生さんであれば合わせて観覧することで基礎的なポイントを整理できると思う。