この記事では、歩行の基礎知識として重要な『セントラルパターンジェネレーター(CPG: Central Pattern Generator)』について、具体例も踏まえながら、分かりやすく解説していく。
目次
CPG(セントラルパターンジェネレーター)とは
CPG(セントラルパターンジェネレーター)とは、日本語で『中枢性パターン発生器』とも訳され以下を指す。
中枢神経系の中でも下位の階層(脳幹・脊髄)に歩行の基本的リズムを発現する神経回路が存在し、運動出力を生成あるいは修正するようなメカニズムを兼ね備えており、それが『CPG(セントラルパターンジェネレーター)』ということになる。
でもって、そのCPGが「周期的でリズミカルな歩行運動」をした際に駆動する(賦活する)ということになる。
CPG(セントラルパターンジェネレーター)が存在する場所
CPG(セントラルパターンジェネレーター)は脳幹・脊髄に存在する。
でもって、(何度も重複するが)CPGという仕掛けが脳幹・脊髄にあり、CPGに一度スイッチが入って駆動し始めたら、自動的にリズミカルで協調的な動さを発生し続けてくれる。
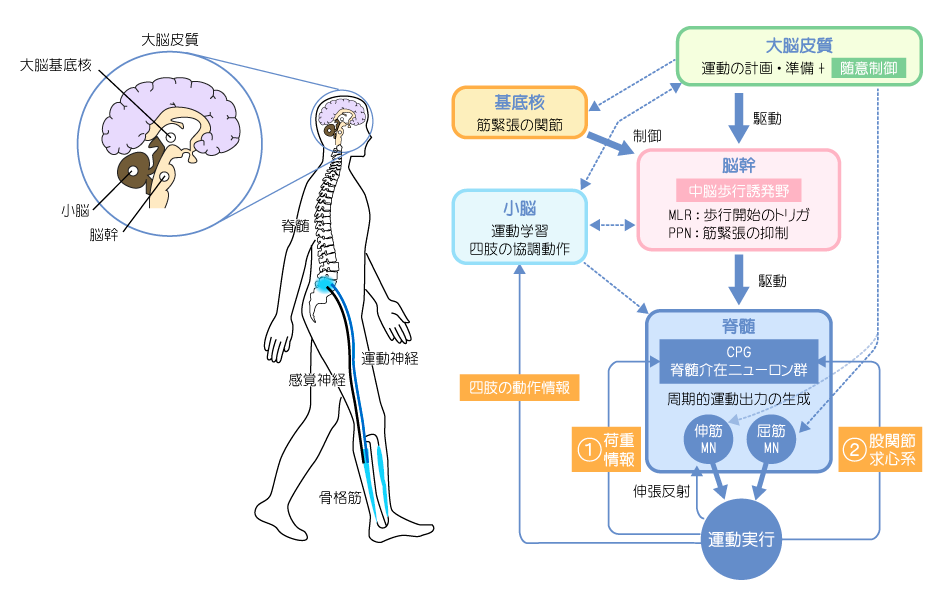
高位中枢で決定された歩行開始の指令は、中脳歩行誘発野など脳幹の歩行中枢を賦活し、最終的に脊髄へと伝達される。
そこから時空間的にパターン化した運動出力を生成する神経機構が、いわゆるセントラルパターンジェネレーター(CPG:Sentral Pattern Generator)である。
この様に、脳幹や脊髄内に基盤となる神経機構が存在する。
歩行時におけるリズミカルな肢運動や姿勢制御は、無意識かつ自動的に遂行され、この過程には脳幹と脊髄におけるsensory-motor integrationが重要な役割を果たす。
また、歩行にはリズミカルな肢運動とともに頭頸部・体幹・上下肢のアライメントや筋緊張の制御が必要である。
これは、歩行リズム生成系と筋緊張制御系の協調的作用により実現される。
~『歩行を診る―観察から始める理学療法実践
』より引用~
ちなみに、CPGは歩行のためだけに存在する仕掛けな訳ではなく、例えば以下などの運動(行為)の際も駆動する。
・食べ物を咀嚼し続ける
・呼吸
・・・・・・・・などなど。
つまり、一度起こり始めたら途切れることなく、リズミカルに、意識にのぼらないで継続される運動(行為)全般に対する仕掛けがCPGということになる。
中枢パターン発生器は、広義の反射の一部として、歩行をはじめとしてさまざまな運動の筋活動パターンに関与している。
呼吸運動や嚥下運動においてもこのような筋活動のパターンをつくる中枢が存在すると考えられており、上位からの入力もしくは感覚入力によって一定の筋活動パターンの出力が行われることが知られている。
CPGは、脳幹や脊髄内の介在ニューロンのネットワークとして存在し、上位中枢からの入力により、リズミカルな筋活動パターンを生成する。
歩行パターン生成に関与するCPGは腰膨大部に存在すると考えられ、実際に腰髄の電気刺激によって、歩行様の筋活動パターンが下肢に出現することが知られている。
一方、嚥下や呼吸運動に携わるCPGは脳幹に存在するとされている。
感覚入力や上位からの入力は、パターンの形成そのものに必須ではないが、パターン発生のトリガーやその修飾因子としてはたらく。
~『現代リハビリテーション医学 改訂第4版
』より引用~
歩行(ロコモーション)における『意志運動』と『自律運動』
「歩行におけるCPG」を解説するにあたって、まずは『ロコモーション』と『意志運動・自律運動』という用語について記載していく。
歩行はロコモーションに含まれる
ロコモーション(Locomotion)は、日本語に訳すと『移動』であり、以下の様に定義されている。
でもって、『歩行』はロコモーションに含まれるが「ロコモーション=歩行」ではなく、例えば以下なども身体が移動しているので(広義な意味での)ロコモーションに該当する。
・寝返り
・起き上がり
・移乗
・・・・・・などなど。
ロコモーションは『意志運動(意図的な運動)』なため、脳(特に皮質)の貢献度が高い。
例えば、「体勢が苦しい」「向こうにあるものを取ろう」などと考えてゴロゴロと寝返ったり、「車椅子へ移ろう」という目的を意識して移乗したりする。
でもって、歩行においても『歩き始めは脳(特に皮質)が強く関与していること』が明らかになっている。
※例えば歩くにも目的があったり、スピードを予め考えておいたり、どういう動線で歩こうかなど考えたりすることが影響しているのかもしれない。
そして、歩き始めに皮質が関与しているという事は、基本的に屈筋群が作動するという事になるので、足を持ち上げて一歩前へ出すという活動が、まずは起こることになる。
しかし一方で、一度歩き始めると(意志運動ではなく)自律運動の要素が強くなる。
つまり、何も考えず、無意識に(自律的に)歩き続けることが出来るようになるということだ。
ちなみに、上記は厳密にいうと「自律的要素が優位な歩行になる」という意味なのだが実際は以下などによって「意志的要素・自律的要素のどちらが優位な歩行になるか」は異なってくる。
- 意志的要素が優位な歩行
⇒外乱などが生じる環境での歩行など(左右へ揺れている電車内を歩行するなど)
- 自律的要素が優位な歩行
⇒整地で障害物が何もない環境での歩行など
ちなみに『意志運動』・『自律運動』という用語に関しては以下でも解説しているの興味があれば観覧してみてほしい。
関連記事⇒『随意運動と不随意運動(+違い)』
一度歩き始めた後は、CPGが駆動し始める
歩き始めは意志運動で脳(特に皮質)が関与するが、一度歩き始めると自律運動となり無意識な歩行が可能になると前述した。
そして(前述したように)自律運動は、CPG(セントラルパターンジェネレーター)の駆動が関与していると言われている。
重複するが 、正常人ではCPGが駆動し始めるので、一度歩き出してしまえば、あまり意識しなくとも歩行を続けることが出来る。
(右足を出して、次に左足を出して等と考えなくとも歩けるということ)。
あるいは、会話をしながら(二重課題)であったり、考え事をしながらであったりでも歩行を続けることが出来るのだ。
このCPGは、意識的な活動ではなく脊髄の仕掛けで動いているので、それはつまり直接的に脳卒中で障害される場所ではないという事を意味している。
この点は、「脳に障害があってもCPGを駆動(賦活)させる歩行リハビリ(理学療法・作業療法)が可能である」という意味で重要となる。
ちなみにセントラルパターンジェネレーターに関して、もっと専門的な文献をお探しの方は以下などが参考になると思う。
外部リンク:セントラルジェネレーターに関する文献
歩行時にCPGを駆動(賦活)させるための条件
前置きが長くなったが、この辺りからリハビリ(理学療法・作業療法)にも関係ありそうな内容に入っていく。
ここまでの内容で歩行時にCPGを駆動(賦活)させたほうが良いというのは分かってもらえたと思う。
でもって『CPGの駆動(賦活)』に関与している要素が以下であり、この要素はリハビリにも応用出来そうなものが含まれている。
①上位中枢からの入力
②求心性フィードバックの種類と入力の程度
③求心性フィードバックの手足と身体の位置の影響
※①は内網様体脊髄路などが関与しており、上位から制御されている要素もあるということ。
※でもって、以降はリハビリとして活用できそうな②と③に関して記載していく。
CPGの駆動に関与する要素② 求心性フィードバックの種類と入力の程度
リズミカルに足底からの信号(足底からの床反力情報・足底メカのレセプターからの情報)が脊髄に入ってくることで、CPGが駆動(賦活)される。
つまり、ハンドリング下でも良いのでテンポよく、左右対称な、麻痺側も含めて十分な荷重が加わりながらの歩行でCPGが駆動するということ(ハンドリングは後述の動画を参照)。
ちなみに、後述するBWSTTも、早期からこの要素を考慮したトレーニングと言える。
CPGの駆動に関与する要素③ 求心性フィードバックの手足と身体の位置の影響
筋紡錘から脊髄へ入ってくる情報が重要だということ。
※この情報が他のニュ―ロンネットワークのスイッチをジェンジングするために重要と言われている。
例えば、(再び後述するが)立脚後期に股関節屈筋群が伸張されることにより、対側下肢における(歩行にまつわる)筋群のスイッチがONになるといった仕掛けが脊髄のニューロンネットワークの仕掛けに存在しているということ。
あるいは(再び後述するが)立脚後期に下腿三頭筋が伸張されることでも、(歩行にまつわる)他の筋群のスイッチを入れる働きをしてくれている。
上記の例からもわかるように、立脚後期がきちんと実現されるかどうかはCPGを駆動するうえで重要となってくる。
歩行時にCPGを駆動(賦活)させる条件まとめ
ここまでのまとめとして、歩行時にCPGを駆動させるためには以下などが重要という事になる。
- 左右対称でリズミカルな歩行
- 立脚初期においてイニシャルコンタクト(踵接地)が両側性に実現されてた歩行
- 両側性に立脚後期がきちんと実現された歩行
つまり、脳卒中片麻痺患者によくみられる2動作(あるいは3動作)の『揃え型』な歩容(いつも麻痺側の足を前において歩くような歩容)では、CPGを駆動するチャンスが少ないことを意味する。
なので、潜在的に立脚後期が作れるだけの能力を有しているかを早期に見極めて、CPGを駆動(賦活)させるような歩行にチャレンジすることは有意義と言える。
例えば体幹stabilityが不十分な時期であっても、体幹コントロールはセラピストで多少介助しながらでも、足を交互に出しながら歩くということは非常に重要となる(末梢の随意性に関しては装具で対応するなどでも良いので)。
※ハンドリングの動画は後述
CPGの切り替えにおける求心性情報として有名なもの
前述した内容と重複する部分もあるが、「CPGの切り替えにおける求心性情報」として有名なものは以下があげられる。
- 荷重に関する情報:
具体的には「下腿三頭筋からのIb抑制」や「足底のメカのレセプターからの入力」
- 股関節の位置情報:
具体的には、(立脚後期における)股関節屈筋群の伸張が信号の一つになっている。
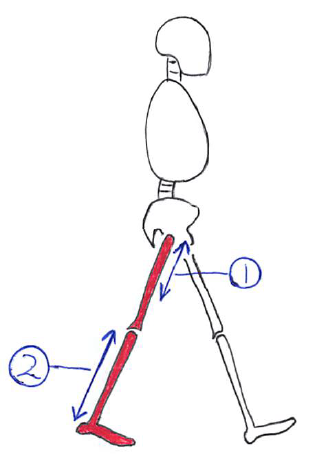
①股関節屈筋群の筋紡錘
②筋紡錘とゴルジ腱器官の同時興奮
⇒荷重刺激
荷重負荷の急激な減少によって遊脚期が開始される。
CPGは歩行周期に応じて生じる感覚情報(とりわけ「荷重情報」と「股関節求心系」)との相互作用によって、運動リズムの安定化、立脚ー遊脚の位相転換などが実行される。
~『脳卒中片麻痺者に対する 歩行リハビリテーション
』より引用~
BWSTTとセントラルパターンジェネレーター
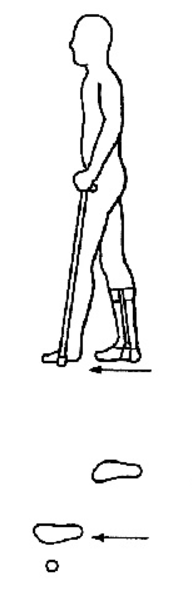
脊髄損傷患者や脳卒中片麻痺患者などが実施する歩行練習にボディーウェイトサポートトレッドミルトレーニング(BWSTT : Body Weight Support treadmill training)がある。
具体的には、以下の動画の様に上半身を釣り上げた状態(歩行しやすい環境下)での歩行練習ということになる。
ちなみに、理学療法診療ガイドライン(脳卒中)において、トレッドミル歩行(BWSTT)は「推奨グレードB・エビデンスレベル2」に位置づけられている。
BWSTTのメリットは以下の通り。
- 早期からの歩行を通じて荷重学習ができる。
※ちなみに、「早期からの歩行練習」は理学療法ガイドライン(脳卒中)において「推奨グレードA・エビデンスレベル2 」に位置づけられている。
- 自重をコントロールすることで歩行中の身体的な負担が軽減でき、長い治療時間を確保できる。
※ちなみに、「体力低下に対する理学療法」は理学療法ガイドライン(脳卒中)において「推奨グレードA・エビデンスレベル4」であり、以下の様な記述がある。
有酸素運動は、脳卒中患者の最大酸素摂取量を向上させ、歩行能力も向上させる。
維持期脳卒中片麻痺患者の毎日の歩数は、心肺機能と大きく関与している 。
脳卒中患者は退院後、無酸素性作業閾値が健常者と比べ低下する。
入院の間の理学療法は廃用性低下の防止のために質的にも量的にも再検討されるべきである。
退院後に、健康を改善するために、よりアクティブなリハビリテーションプログラムを患者に与えるのが重要である。
トレッ ドミル歩行による有酸素運動は、維持期脳卒中患者の歩行機能や最大酸素摂取量を改善させる。
トレッドミル歩行による有酸素運動は、脳卒中片麻痺患者の歩行時のエネルギー効率、移動能力、下肢筋力を改善させる。
- 体重が重い対象者であっても転倒リスクなしでセラピストの負担を少なくし安全に歩行できる。
- 対象者の歩行練習意欲を高めることができる。
- CPGを賦活出来る可能性がある。
BWSTTでCPGが賦活させる
随分前置きが長くなってしまったが、この記事で伝えたいのは「(前述した)BWSTTのメリット⑤」すなわち「BWSTTでCPGを賦活出来る可能性がある」という点である。
でもって、BWSTTでCPGが賦活できる可能性がある理由は、前述したように以下の3点である。
- 左右対称でリズミカルな歩行
- 立脚初期においてヒールコンタクト(踵接地)が両側性に実現されてた歩行
- 両側性に立脚後期がきちんと実現された歩行
以下の動画は、BWSTTの実際の場面となる。
以下の動画では、セラピストが下肢を後方へ引っ張って股関節を伸展させることで立脚後期を作り出していると思うが、これは「CPGを賦活」も目的としている。
脊髄には、基本的な歩行パターンを作る中枢パターン発生器(Central Pattern Generator : CPG)という神経回路網があることが知られている。
このCPGとともに、脊髄には学習能力があることも提唱されている。
釣り上げ式体重綿免荷歩行は、これらを理論的背景として開発された。
この方式の歩行練習では、通常は2人の理学療法士が脊髄損傷者の左右に位置し、トレッドいるの速さに合わせて立脚相と遊脚相を介助する。
この時には正常歩行を再現するように介助、し立脚期での膝伸展と立脚後期での股関節伸展を意識して介助する。
このように下肢への体重負荷と股関節伸展が、脊髄歩行中枢を刺激するために重要と考えられている。
~『理学療法診療ガイドライン 第1版 ダイジェスト版 脊髄損傷』より引用~
「こんな大それた装置は当院に無いし、紹介されても意味ないよ」と思われる方は多いかもしれない。
しかし、これらの動画を紹介したのは「こういう機械を使ってトレーニングしましょう」という意味ではない(そりゃ、使えるに越したことはないが・・・)。
歩行における股関節伸展を立脚後期で引き出すことが、いかにリハビリ(理学療法・作業療法)に重要かを伝えたいだけである。
中枢ジェネレーターを賦活せよ!
2動作(あるいは3動作)の『揃え型』ではなく、非麻痺側を(可能であれば)麻痺側下肢より前方へイニシャルコンタクトできるよう誘導することは、セントラルパターンジェネレーターを駆動させるために有意義となる。
例えば、「杖を使用しての2動作揃え型」よりも、(可能なだけの能力を有しているのであれば)「後方からセラピストが体幹を支え(+誘導)ながら、非麻痺側下肢もある程度前方へ振り出してヒールコンタクトを作る(=麻痺側の立脚後期にある程度の股関節伸展を作る」といった練習をしたほうがセントラルパターンジェネレーターが駆動され、歩行練習として有用である場合がある。
※体幹をセラピストが支えるのであれば、杖無しで、上肢の振りも利用しながらな歩行練習も可能かもしれない。
体幹ほど麻痺の影響を受けにくく、末梢ほど影響を受けてしまう。
したがって、麻痺の程度によっては足関節の動きを制御するため、装具を着用しての歩行練習ということもあるだろう(理想はロッカー機能を有したものだが、有していなくともCPGは賦活されると思う)。
でもって、末梢の随意性改善に合わせて、装具を外してのロッカーファンクションを取り入れたリハビリ(理学療法・作業療法)も可能かどうかも検討していく(ただ、とにかくADLの早期自立・退院を優先するなど病院の事情などなどでも考え方は異なってくると思う)。
もちろん、この練習の前段階として平行棒内で以下などを実施することで、歩行練習が可能な素地を作っておくなど、別のリハビリと組み合わせて実践する内容であることは言うまでもない(もちろん能力的に非適応なケースも当然あるだろう)。
- 麻痺側下肢を後方へ引いた状態(股関節伸展位)での、足関節を底屈(前足部・特に母趾への荷重を意識しながらのフォアフットロッカーを想定)
- 麻痺側下肢への荷重練習
- ステッピング練習(麻痺側下肢へ荷重した状態で、ヒールコンタクトを意識しながら非麻痺側下肢を前方へ振り出す)
重複するが、患者の能力に合わせて実施する必要があり、この様な練習が難しい場合も当然あり得る。
この様な練習が可能な能力を有しているのであればオススメという事(対側上肢の振りも活かしながら、セントラルパターンジェネレーターに必要な股関節の伸展も多少は起こっている)。
ちなみに、杖を使用するのであれば(患者の能力に合わせて)以下のように、(揃え型ではなく)麻痺側よりも前方へ非麻痺側を接地出来るのであれば、それだけでもCPGは賦活されやすくなるのではないだろうか。

テンポの良い歩行はCPGの賦活を助ける
前述したように、テンポよく、左右対称な、麻痺側も含めて十分な荷重が加わりながらの歩行でCPGが駆動するということになる。
健常者では歩行を続けると一次感覚運動野の活動が低下する傾向があり、特に速度が速い場合に顕著である。
歩行可能な脳卒中片麻痺患者のトレッドミル歩行においても、同様に大脳皮質の活動の速度依存性が認められている。
このことは、歩行速度の向上に伴って歩行制御におけるCPGの役割が相対的に増加し、歩行がより下位の神経機構の制御へと推移することを示唆している。
片麻痺患者の歩行トレーニングにおいても、姿勢保持が可能な範囲で速度を速めて行うことで、歩行運動の自動化を促すことが期待される。
~『脳卒中片麻痺者に対する 歩行リハビリテーション
でもって、リハビリ時の歩行介助の方法は幾つもあるが、CPGの駆動(賦活)も意識した歩行介助であるならば、後方介助がお勧めとなる。
後方介助のススメ
後方介助(後方からの胸郭・骨盤などを軽く保持した状態で体幹コントロールをサポートしながらの介助)は、オススメである。
股関節の積極的な屈曲ー伸展の自動運度により歩行の自動的抑制を促進し、大腰筋の伸張による張力を利用しながらエネルギー効率の良い歩行を実現するためには、患者お後方から密着してアライメントを整えながら前進する、「後方介助」が合理的である。
介助者が患者の後方に位置することで、骨盤後傾・回旋や体幹前傾を介助者の体幹を用いて効率よく修正することができ、かつ介助者自身の歩行中の前方推進力をそのまま伝達して活用することが出来る。
~『脳卒中片麻痺者に対する 歩行リハビリテーション
何だか「脳卒中片麻痺にフォーカスした歩行」な記事な気がするかもしれないが、CPGの賦活や後方介助の考えは、虚弱高齢者や整形術後の患者など全ての患者が対象となる。
もちろん、疼痛や可動域制限によって必ずしも実施できる手法ではないかもしれないが「この記事に記載されている内容を実践するためには、一定の条件が整っている必要がある」という点は、脳卒中片麻痺でも同様である(例えば麻痺の程度など)。
重複するが、ここに記載されている内容は、疾患を問わず活用できるため、是非この様な歩行リハビリ(理学療法・作業療法)にも挑戦してみてほしい。
ただし、テンポよく、ヒールコンタクト、フォアフットロッカーも意識しながらの歩行練習というのは転倒リスクも高くなるので、(何度も重複するが)適応・非適応を十分考慮したり、その人に合ったうような介助方法にアレンジしたりといった工夫が必要になることも多い。
後方介助の方法を動画で紹介
以下の動画は、ジャパンライム社が提供している『DVD:脳卒中後遺症患者へのニューロリハビリテーション』のデモ動画である。
この動画の中に、後方介助下での歩行リハビリをイメージするのにお勧めな場面があったので紹介する。
※この動画では、後方から両上肢を把持しての後方介助歩行をしている。
歩行場面は2分30秒から始まる(数秒間のみ)。
ヒールコンタクトに合わせての重心移動の誘導、上肢の振りなども重要なポイントとなる。
これらの重要性に関しては、以下の記事も併せて観覧してもらうと、さらに理解が深まると思う。
リハビリに必要な『歩行の基礎知識』まとめ一覧
ちなみに上記DVDは、日本ボバース研究会会長でIBITA/JBITA 成人中枢神経疾患上級講習会インストラクターでもある『伊藤 克浩氏』による解説がなされており、脳卒中リハビリを考える上で実践的な内容となっており、非常に参考になると思う。
