この記事では安定性限界について解説した記事となる。
また、補足として足圧中心(COP:center of pressure)にも言及している。
※この記事によってCOPとCOG(center of gravity⇒身体重心)との関係性も何となく理解してもらえると思う。
安定性限界を考える
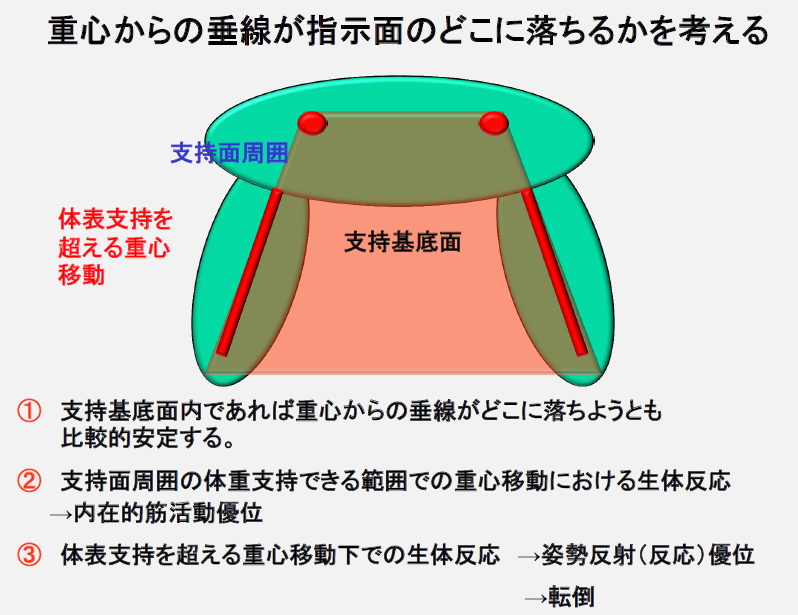
身体を支えるために「身体や支持物が床面と接している部分を線で結んだ領域」を支持基底面と呼ぶ。
以下は、端坐位における支持基底面を示している(左右の坐骨結節と足部を結んだ領域が支持基底面となる。
~画像引用:トランスファー資料より~
一般的には「身体重心を床面に投影した位置」が支持基底面の中央に近いほど安定性が高く、中央から離れるほど不安定となり、ある位置を超えると転倒する。
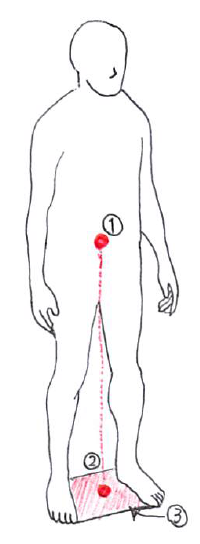
①⇒身体重心
②⇒重心線
③⇒支持基底面
そして、「バランスを崩すことなく、身体重心を支持基底面の中央から離すことのできる限界域」を『安定性限界』と呼び、文字通り「対象者の安定性の限界を示す用語」である。
つまり、一般的には「支持基底面を身体重心が超えてしまったらバランスを崩す」と思われがちだが、実際には「安定性限界を身体重心が超えてしまったらバランスを崩す」という表現が正しいという事になる。
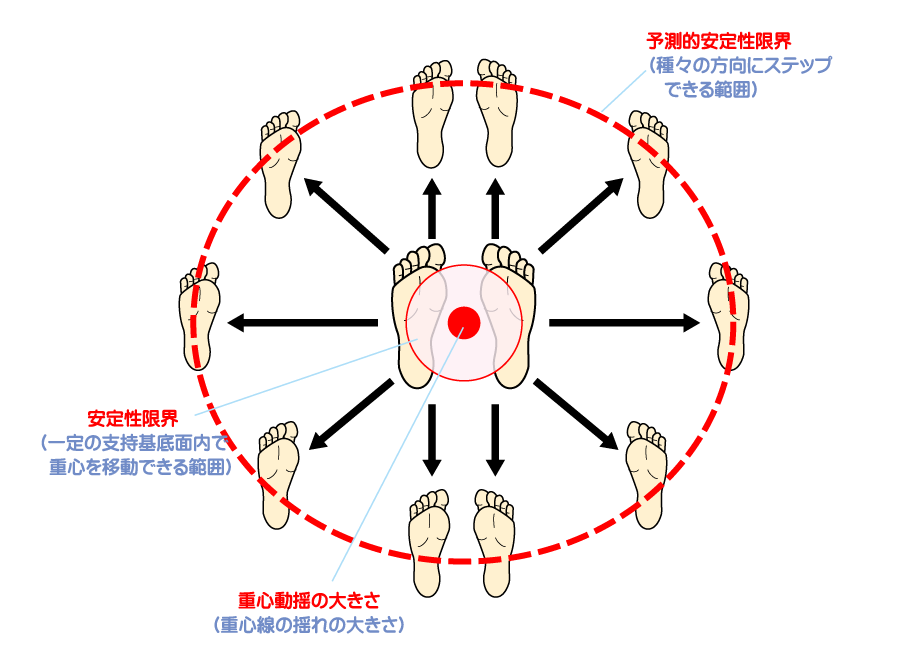
以下は、安定性限界を分かりやすく記したイラストとなる。
※ファンクショナルリーチなどの動的バランスでは、(支持基底面ではなく)安定性限界のギリギリまで重心を移動さることで、前方へリーチしているという事になる。
~画像引用:“臨床思考”が身につく 運動療法Q&A~
ちなみに、上記の『予測的安定性限界』とは「身体重心が安定性限界を超えた際に、足を(前後左右などへ)一歩踏み出すことの出来る範囲」を指し、予測的安定性限界が広い(大きく一歩を踏みだせる)ほうがバランスが良いと考えられている。
つまり、身体重心が安定性限界を超えてバランスを崩しても、予測的安定性限界の範囲内で足を一歩前へ踏み出すことによって転倒するのを防ぐことは可能であり、この様に「一歩前へ踏み出す平衡反応」を『ステッピング反応』と呼ぶ。
関連時期⇒『立ち直り反応と平衡反応(+違い)』
また、上記を少し難しい言葉で厳密に表現すると、安定性限界とは「支持基底面内で、どこまで足圧中心(COP:center of pressure=床反力作用点)を移動出来るか示したもの」となる。
論理的には足圧中心は支持基底面の外縁まで移動可能であるが、ヒトでは足圧中心の移動可能な範囲は支持基底面より狭くなり、これを安定性限界と呼ぶ。
~運動療法学より~
ここで『足圧中心』という用語が新たに登場したので、補足として足圧中心を解説していく。
足圧中心(COP)とは?
ここから先は、足圧中心(COP:center of pressure)について記載していく。
足圧中心は床反力作用点とも呼ばれ、「床反力ベクトルの作用線が、床面を貫く点」でもある。
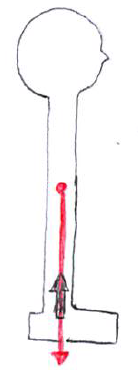
黒矢印⇒床反力ベクトルの作用線
(そして、床反力ベクトルが床を貫く点が足圧中心)
赤矢印⇒重心線
足圧中心を考える際のポイント
足圧中心に関してのポイントは以下の二つとなる。
①足圧中心は必ず支持基底面内に位置する
②身体重心と足圧中心は静的状態でも変化している
①足圧中心は必ず支持基底面内に位置する:
足圧中心は支持基底面から外へ出ることは無い(そして支持基底面内で足圧中心が移動出来る限界域を「安定性限界」と呼ぶのは前述したとおり)。
一方で、身体重心は支持基底面から外へ出ることがある。
厳密には、「静的バランスを考えた場合は、足圧中心も身体重心も支持基底面内にとどまっているが、動的バランス(例えばステッピング反応・歩行など)で考えた場合は(足圧中心は支持基底面の外には出ないが)身体重心は外へ出る」ということになる。
そして身体重心が外へ出ることで「新たな支持基底面」・「新たな足圧中心」が生まれる⇒これが連続して成されることが「歩行」へ繋がる。
関連記事⇒『静的バランスと動的バランス(+違い)』
②身体重心と足圧中心は静的状態でも変化している:
静的立位姿勢では、一見すると身体は静止しているように見えるが、厳密には身体重心の僅かな動揺が生じている。
そして、身体重心の動揺を制御するために足圧中心の位置を私たちは変化させている。
また、身体重心(を床に投影した点)と足圧中心との位置が解離することで身体重心に回転モーメントが生じるため、足圧中心は身体重心の移動方向に対して先回りをして逆方向への回転モーメントを与える。
例として、以下のイラストを参考にしてみて欲しい。
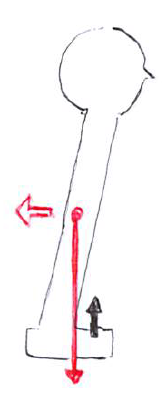
体がやや前方へ傾斜している。
そして、身体重心(線)は支持基底面の前方にあるが、足圧中心はさらに前方にある(つまり、身体重心より足圧中心が前方にある)。
足圧中心からの床反力で身体重心を後方へ移動させようとする力が働く。
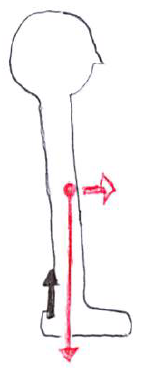
体がやや後方へ傾斜している。
そして、身体重心(線)は支持基底面の後方にあるが、足圧中心はさらに後方にある(つまり、身体重心より足圧中心が後方にある)。
足圧中心からの床反力で重心を前方へ移動させようとする力が働く。
要は、身体重心が前後左右どちらへ移動しようとも、足圧中心の床反力が先回りして(支持基底面の中心へ)跳ね返すような反応が繰り返されている。
そして、このような制御を繰り返すことで身体重心は支持基底面内に収まっている。
歩行と足圧中心(COP)
余談として、「歩行と足圧中心(COP)」についても補足しておく。
『安定性限界』とは「それ以上支持基底面の外側へ逸脱すると転倒を招く限界このとである」と前述した。
でもって、動作にも安定性は重要であるが、特に移動動作(つまり歩行)で高すぎる安定性は阻害因子となることがある。
歩行では必ずしも常に支持基底面上に重心投影線は位置せず、あえて不安定化させることで重心の移動を効率的にしている。
もし支持基底面の中心に重心投影線を止めたまま重心や支持基底面を移動しようとすると、多大な筋活動や外力を要し、非効率的になる。
歩き始めの重心移動とCOP
歩き始めの重心移動とCOPについて記載していく。
- 重心の移動:
歩き始めるには、振り出し脚の荷重を減少させて振り出す必要がある。
そのため重心を支持脚へ移動させなければならない。
例えば右下肢を振り出すとき、一度左下肢に重心を移動させ、左下肢の荷重を立位時より増大させる。
そうすると右下肢の荷重が減少して、右下肢を振り出すことができる。
また重心は振り出し脚を振り出すときに、支持脚への側方移動に加え前方にも移動している。
姿勢保持では支持基底面上に重心が位置することは必須である。
しかし、単脚支持期の足底上に重心が位置することはなく、単脚支持期の足底上に位置するのは『COP』である。
- COPの移動:
重心が両足底間の中心から支持脚の前足部方向へ移動するとき、COPは重心と逆の運動(逆応答現象)を示す。
つまり、COPは歩き始めに一度振り出し脚の踵側(後方)へ移動する。
その後、支持脚に移動し、さらに前足部へ向かう。
これらの結果、重心は対側の前方かつ支持脚へ移動しやすくなっている。
※この様な不安定化によって、人体の歩き始めに大きな筋活動を不要とさせている。
立位保持では、床反力ベクトルが足関節の前方を通るために足関節底屈モーメントが必要となり、下腿三頭筋の筋活動を要する。しかし歩き初めの下腿三頭筋の筋活動は、下腿前傾(足関節背屈)を阻害し、重心の前方移動を阻害する。
なので、下腿三頭筋の筋活動を減弱することで重心は前方に移動する。
ちなみに、「重心移動」より「COP移動」は速いため、COPが重心を運動(移動)させているようにみえるが、重心とCOPの運動はほぼ同時に起こるとされている。
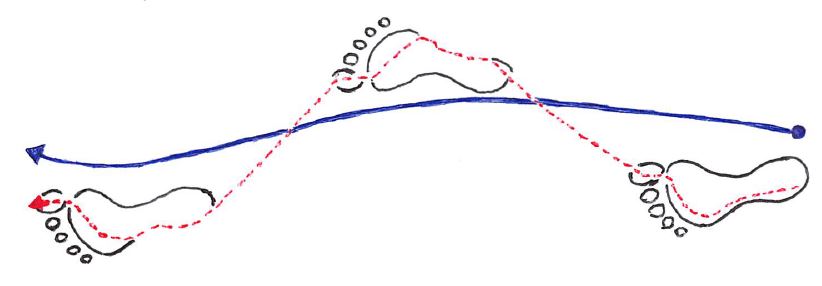
以下は、歩行周期中のCOPとCOGの軌跡を示している。
・実線はCOG
・破線はCOP
観覧してもらえばわかるように、これらは決して一致することは無い。
ちなみに「歩き終わり」では、前述した「歩き始め」とは対照的な運動を示す。
つまり、COPは重心より先に前方へ移動し、前方から重心制動する。
若年者と高齢者における安定性限界の違い
「足圧中心」や「歩行」の話は終わりにして、再び安定性限界に話を戻す。
ここまでの記事で、「安定性限界を身体重心が超えてしまうとバランスを崩してしまう」ということを述べてきた。
そして、「同じ支持基底面であっても、安定性限界は人によって全く異なる」というのも重要なポイントだ。
以下のイラストは同じ支持基底面を持つ高齢者と若年者の安定性限界の違いを示している。
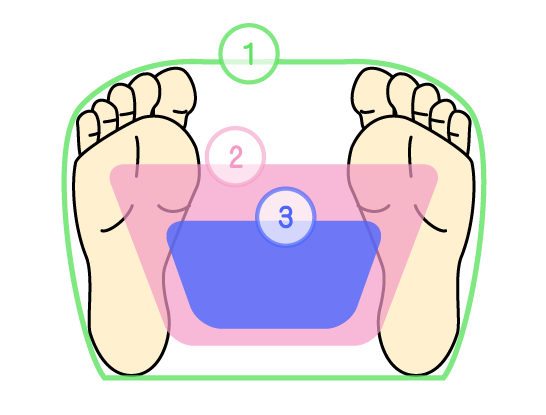
①⇒支持基底面 ②⇒若年者の安定性限界 ③⇒高齢者の安定性限界
つまり、同じ支持基底面でも若年者と高齢者では安定性限界が全く異なり、高齢者は狭い範囲内でしか身体重心の移動が出来ない。
安定性限界には筋力、身体の柔軟性、判断能力、刺激に対する反応速度など、様々な要素が関与している。
このため、支持基底面が同じであっても、高齢者では若者に比べて(安定性限界が狭いため)バランスを崩しやすいということになる。
安定性限界まとめ
この記事のまとめとしては、以下の点だけでも覚えてもらえれば幸いである。
ポイント①:
バランスを改善させるためには、支持基底面を広くするという考えは大切であるが、同時に「安定性限界を広げる」という考えも大切である。
ポイント②:
重心動揺が小さいほど、安定性限界が大きいほど、予測的安定性限界が大きいほどバランス能力は高く、「バランスが良い」ということになる。
安定性限界・足圧中心(COP)関連記事
以下の記事でも足圧中心に関して多少触れているので、合わせて観覧すると足圧中心への理解が深まると思う。
⇒『足関節戦略・股関節戦略(+違い・筋活動)でバランスを考える』
その他で、併せて読むと理解が深まるおススメ記事は以下となる。