この記事では、リハビリ(理学療法・作業療法)に重要な知識である「バランス能力(姿勢保持能力)」について記載していく。
バランス能力とは?
バランス能力の解釈は様々あるが、今回は以下の3つにバランス能力を分類して記載ていく(この分類は、一つの解釈に過ぎないことに注意して観覧して頂きたい)
・静的姿勢保持能力(⇒静的姿勢性制御が関与)
・外乱負荷応答能力(⇒反応的姿勢制御が関与)
・随意運動能力(⇒予測的姿勢制御や適応的姿勢制御が関与)
※姿勢制御とは「姿勢を安定した状態に保持する働き」を指す。
静的姿勢保持能力とは
静的姿勢保持能力とは「身体を静的に安定した状態に保持しておく能力」を指す。
そして、静的姿勢保持能力に関与している「静的姿勢制御」は以下を指す。
静的姿勢保持能力の評価としては、例えば以下が挙げられる。
外乱負荷応答能力とは
外乱負荷応答能力とは「外乱に抗して身体を安定させる能力」を指す。
そして、外乱負荷応答能力に関与している「反応的姿勢制御」は以下を指す。
外乱負荷応答能力の評価としては、例えば以下が挙げられる。
- 患者は端坐位で、療法士は後方から殿部を支える。
- 療法士は骨盤を左右へ傾斜させ、四肢や体幹の反応を見る。
- 最初はゆっくりと傾斜させる
- 次に、速く行う。
※前後左右についても同様の手順で行う。
外乱刺激を負荷にする場合、骨盤をゆっくりと傾斜させるット健常者では立ち直り反応が出現し、頭部を静注意に保持しようとする。
一方、速く傾斜させると、傾斜反応や保護伸展反応などの平衡反応が出現する。
関連記事⇒『立ち直り反応・平衡反応(+違い)』
随意運動能力とは
随意運動能力とは「運動による姿勢の変化に応じて、身体を安定させる能力」を指す。
そして、外乱負荷応答能力に関与している「予測的姿勢制御」と「適応的姿勢制御」は、それぞれ以下を指す。
- 予測的姿勢制御(先行随伴性姿勢調節)
動作中、身体が不安定な状態となる前にその状態を予測し、回避するようにあらかじめ姿勢を調節する働き
- 適応的姿勢制御
動作中、身体が予測不可能な不安定な状態になった際に、転倒する前に身体重心を変化させて姿勢を安定させる働き
※前述した外乱負荷応答能力が「外乱に応じた姿勢制御」が要求されるのに対して、随意運動能力は「自らの意志で姿勢を変化する際の姿勢制御」が要求されるといった違いがある。
随意運動能力の評価としては、例えば以下が挙げられる。
具体的には、座位、立位でリーチ動作を行うなどが該当する。
つまりは、「安定性限界がどの程度か」を評価しえいるともいえる。
極論として、ヤジロベイの様に絶妙な「重心と支持基底面の位置関係」で静的姿勢保持が可能であったりする。
しかし、それは単に「座っていられるだけ」「立っていられるだけ」であって、機能的な姿勢保持とは言い難い。
例えば、端坐位が可能であったとしても、服の着脱時のような「能動的に少し姿勢・重心が変化するレベル」でバランスを崩すのであれば機能的な端坐位とは言えないという事だ。
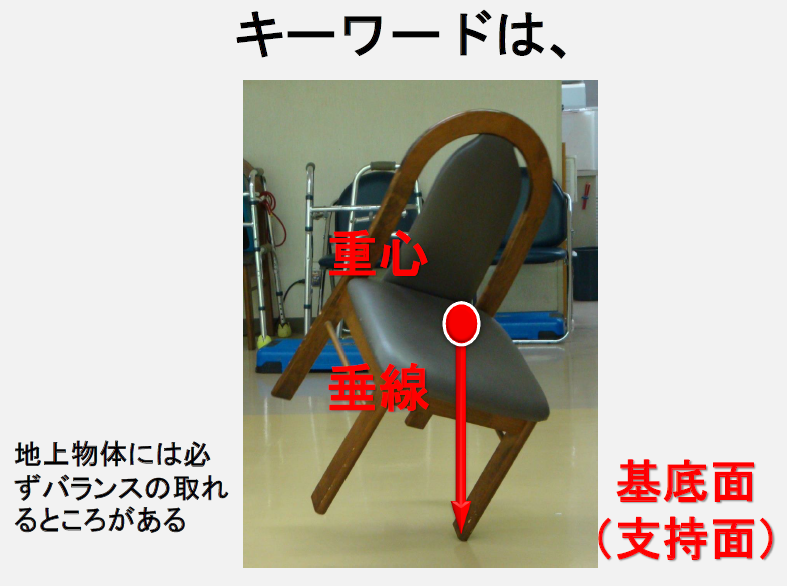
~画像引用:トランスファー資料~
こういった例の際に「随意性運動能力が低下している(安定性限界が非常に狭いこと)」と表現されることがある。
そして、この「随意性能力の改善(安定性限界の拡大)」を図ることは、「余裕のある姿勢」を生みだし、様々なADLが遂行となる可能性を秘めている。
関連記事
⇒『安定性限界とは』
予測的姿勢制御(先行随伴性姿勢調節)の補足+関連記事
反射や反応は何かしらの刺激は入力されなければ起こらす、自分ではコントロールできない。
立ち直り反応や平衡反応も外乱などの刺激は入った後に起こる。
これらの反応的バランス制御は必然的に反応時間の遅れを伴うため、この機能だけはバランスを保持できない。
そこで身体(中枢神経系)は、反応的バランス制御を補うために必要な姿勢調節を予め運動に先行させて準備しており、これこそが『予測的姿勢制御(先行随伴性姿勢調節)』である。
予測的姿勢制御(先行随伴性姿勢調節)は、どのような運動が実際に行われるかに依存して、通常有無う意識の内に行われる。
そんな予測的姿勢制御(先行随伴性姿勢調節)の出力先として重要視されているのが体幹インナーマッスル(コアマッスル)であり、詳しくは以下を参照して頂きたい。