この記事では、リハビリ(理学療法・作業療法)で馴染み深い用語である『フィードバック』と『フィードフォワード』に関して記載していく。
この記事を観覧することで、フィードバックとフィードフォワードの違いを何となく理解してもらえると思う。
フィードバック・フィードフォワードとは
フィードバック・フィードフォワードは以下の意味を持つ。
~理学療法学事典より引用~
フィードバック(Feed back):
フィードバックとは、ある目的のために反応を起こし(原因)、結果が目的と一致すれば終了し、一致しなければ修正するということ。
すなわち、原因から導かれた結果を、原因に反映させること。
フィードフォワード(Feed forward):
ある目標の達成のために結果から誤差を修正していくフィードバック制御に対して、ある目標の達成に向けて、常に変化する状況を情報として取り入れ、フィードバックせずに将来の変化を予測しながら方法を変化させていくことをフィードフォワードという。
もう少しピンときそうな解説として、『書籍:理学療法評価学 』からも引用しておく。
新たに運動プログラムを作成しながらの運動遂行では、目的とする運動と遂行されている運動の誤差を検知し修正しながらの運動制御が行われることになり、 これをフィードバック制御(feedback control)という。
すでに作成され記憶された運動プログラムを使用するのは、運動学習が完成された状態と考えられ、この運動制御はフイードフォワード制御(feedforward control)といわれる。
フィードバック制御とフィードフォワード制御
人間は『随意運動』によって運動を起こすのだが「運動が自分の意図したとおりに行われているか」の調節が必要であり、
この調整には「フィードバック制御」・「フィードフォワード制御」が関与している。
運動の制御にはその運動の速さにより「ゆっくりとした運動」と「早い運動」がある。
でもって、ゆっくりした運動は、運動による全身の変化を固有受容器や視覚からの情報を中枢に送り、そして再調節しながら運動を行っていく『フィードバック制御(閉ループ制御)』を受ける。
一方、運動が素早く行われるためには、運動する前から前もって運動の結果までが予測され、プログラムされているという『フィードフォワード制御(開ループ制御)』を受ける。
例えば、姿勢制御では、外乱を検出してから反応するフィードバックだけではなく、あらかじめ予測される外乱大きさから必要な運動出力を決定するフィードフォワードが必要である。
※フィードバック時間の遅れなどの理由により、フィードバック制御だけでは速い運動を制御することは理論的に不可能とされている(つまりフィードフォワード制御が必要)。
フィードバック・フィードフォワードの具体例①
例えば、斜面を滑っているとき、前方に小さな出っ張りがあったとする。
それに乗りあげて身体が後方に転倒しかけたとする。
その際、身体が動揺しない望ましい状態と実際に後方に動揺して転倒しそうになった状態との差を検知して、望ましい状態に戻そうとするのが『フイードバック制御』である。
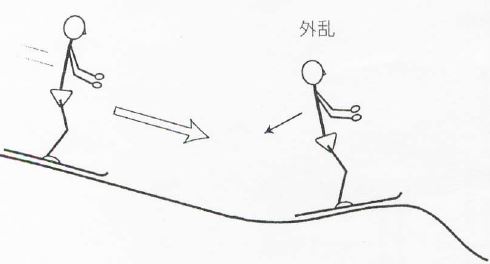
これに対して、運動に習熟した場合、出っ張りに乗りあげたときの身体の動揺すなわち外乱を予測し、それを打ち消すように姿勢を準備しておくことが可能となる。
この例では、外乱による身体の後方動揺を相殺するために、出っ張りに当たった瞬間に身体を前方に傾斜させることになる。
この場合の制御方式が『フイードフォワード制御』である。
運動学習の観点からみれば、フィードバック制御を反復しながら新しい運動を学習し、次第に運動プログラムが完成してフィードフォワード制御に至ると考えられている。
フィードバック・フィードフォワードの具体例②
例えば、「急な揺れが起こる電車」に乗っている場合を考えてみる。
電車が瞬時に激しく揺れた場合、「フィードバックによる姿勢制御」のみならず、揺れる前からの姿勢制御(フィードフォワード)、つまり「この電車は急に揺れる。その揺れはこの程度だがら、これくらい踏ん張らなくちゃ」といった外乱の予測が転倒しないためには重要となる。
ちなみに、立位姿勢で両側の素早い肩関節の屈曲を行うと、三角筋(前部線維)の収縮の前に、姿勢筋である大腿二頭筋や脊柱起立筋が収縮し、体の動揺を抑えるための予測的な反応が起こる。
※この姿勢筋の反応がフィードフォワードであり、この点は『予測的姿勢制御』として以下の記事でも解説しているので合わせて観覧してみてほしい。
運動は遂行、修正され、ふたたび遂行の過程で学習されて、徐々に複雑な経路を介さ
ず運動が行えるようになっていく。
また、PNFを例にすれば「リズミックスタビライゼーション」と「スタビライジングリバーサル」の違いをフィードバック・フィードフォワードに置き換えると理解が深まるかもしれない。
- リズミックスタビライゼーション(等尺性収縮)
⇒ゆっくりした徒手抵抗(=フィードバック制御を利用)
- スタビライジングリバーサル(等張性収縮)
⇒段階的に素早い徒手抵抗も利用(=フィードフォワードも利用)
※関連記事⇒『PNFテクニック(拮抗筋テクニック)を解説!』
フィードバック誤差
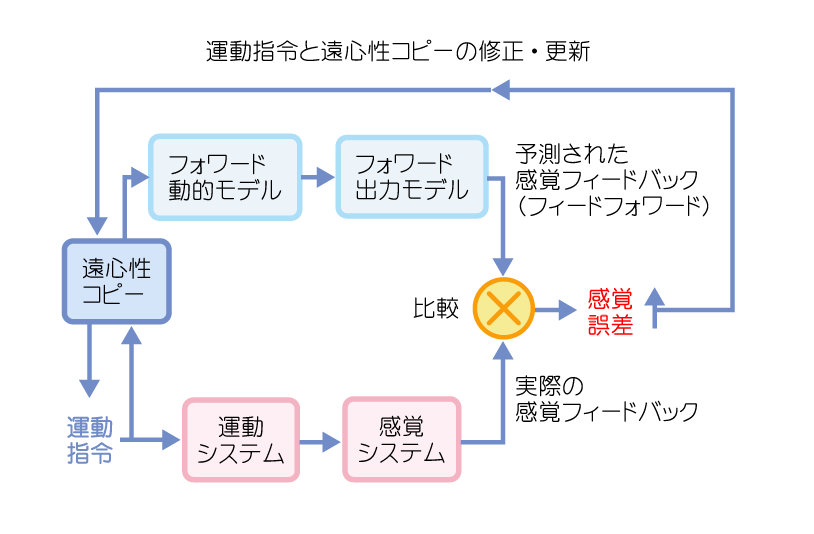
運動指令は実際の運動となって出力されると同時に、運動の結果の予測を形成する。
この「運動の結果の予測(フィードフォワード情報)」と「実際の感覚フィードバック情報」が比較・照合され、誤差があれば、それに基づき運動指令が修正される。
脳はこの誤差を小さくするように、運動を学習していき、感覚フィードバックに頼らない予測的運動制御モデル(内部モデル)を脳内に作り上げる。
先ほどの電車の例では、「電車は、この程度揺れるものだ」というフィードフォワード情報を持っていたとして、実際の揺れが予想をはるかに上回るものであれば、あなたはバランスを崩しそうになるだろう(それでも何とか感覚フィードバック情報によって踏みとどまれた)。
つまり以下の2つに誤差が生じていたことを意味する。
- 「電車は、この程度揺れるものだ」というフィードフォワード情報
- 「バランスを崩しそうになった(踏みとどまれた)際」の感覚フィードバック情報
でもって(重複するが)、脳はこの誤差を小さくするように、運動を学習していき、感覚フィードバックに頼らない予測的運動制御モデル(内部モデル)を脳内に作り上げる。
つまり、「この電車は、自分の予想をはるかに超える揺れを起こすのだな」といった『新たなフィードバック情報(予測的運動制御モデル)』を脳内に作り上げるといこと。
この様に、「フィードフォワード情報」と「実際の感覚フィードバック情報」が比較され、誤差があれば、それに基づき運動指令を修正・更新しながら学習していくことを『フィードバック誤差学習』と呼ぶ。
この『フィードバック誤差学習』が繰り返されると、その運動について正確な内部モデルが構成され、正確な運動ができるようになるだけでなく、やわらかで(関節スティフネスが小さく)、なめらかな運動ができるようになる。
フィードバック誤差学習は、比較的運動時間が短く、正確さを要する熟練運動の運動学習をよく説明することができる。
※フィードバック誤差学習を担う領域は、主に(頭頂葉や)小脳とされている。
脳卒中の運動麻痺と「フィードバック誤差学習」
運動療法との関連では、例えば脳卒中片麻痺の場合、病前(脳卒中を発症する前)に構築されたフィードフォワード情報があてにならない。
なので、内部モデルで運動指令を計算しても、意図したしたとおりの運動を実現することはできない。
したがって、片麻痺が存在する状態で意図したとおりの運動を実現するには、それらの要素を含んだ内部モデルを構築し直す必要がある。
そのため、多様な運動課題を繰り返し練習して、内部モデルを再構築しなければならない。
※多くの感覚フィードバックをリハビリで取り入れることで『フィードバック誤差学習』を起こすことは重要となる。
病態失認とフィードバック誤差学習
病態失認では、運動の意図もフィードフォワード情報も構築され、実際の感覚フィードバックも入力されるが、このフィードフォワード情報とフィードバック情報を正しく比較・照合することができなくなっている。
※あるいはフィードバック情報と比較して、運動の意図やフィードフォワード情報が優勢となり、フィードバック情報が無視されるために生じると考えられている。
病態失認の詳細は、以下の記事も参照してみてほしい。
失認(apraxia)とは? 半側空間無視など、種類や特徴を解説!
徒手療法は繰り返しの実技練習が重要な件
徒手療法の技術は練習を重ねることにより、それらパターンをあらかじめ大脳基底核、小脳歯状核や小脳中位核にプログラムし、随意運動を意図した時に直ちにそのプログラムによるパターンが発生するようになる。
初学者は内分出るがないのでフィードバックで学習を行う。
※ フィードバックでは間違った分だけ修正がなされる。
一方で、熟練者はフィードフォワードを行う。
※フィードフォワードでは「あらかじめこうなるだろう」と予測する。
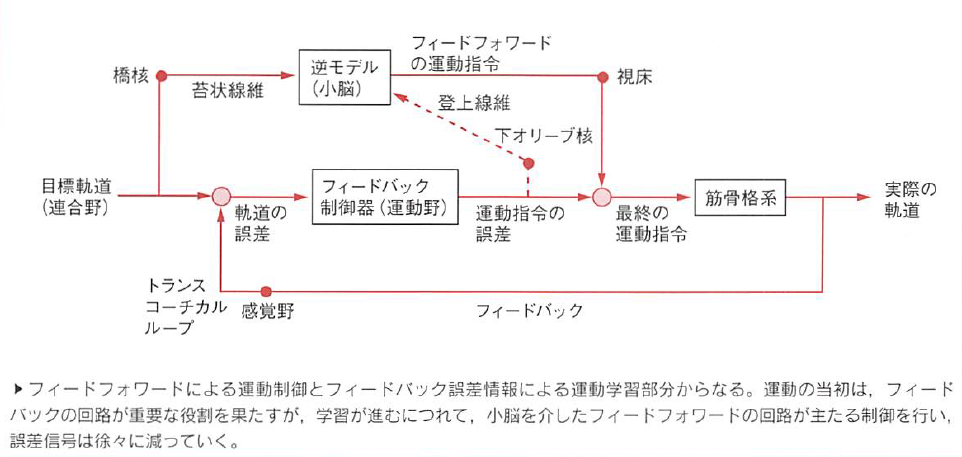
過去の経験によって手に入れたフィードフォワードの内部モデルは小脳にあり、学習後はここからの命令によりフィードフォワードに切り替わる。
目標を持ち、それに近づいていこうとフィードバックを誤差学習によって繰り返し、内部モデルが形成されれば、その後はそれを使ってどうすればよいか予想される。
フィードフォワードが出来るまでには正しい技術の学習を何度も何度も繰り返して行わなければならない。
これは、身体を使ったすべての技術に通ずる心理である。
徒手療法の治療技術は、練習を繰り返すことで小脳で最良なパターンがプログラムされるようになり、その機構により治療が行われる。
そして、指導者によるフィードバック(指導者に施術してもらって、その施術を体験することも含む)がなければ、技術の向上はあり得ない。
少なくとも初学者は、徒手療法は教科書・動画を学ぶだけでなく、指導者のもとで実技指導を受けることは重要となってくる。
※徒手療法の熟達者であれば、教科書や動画と、今まで自身が蓄積してきた徒手療法技術を照らし合わせることで(ある程度のものは)習得可能となるかもしれないが。
様々な学習理論
ここで解説した『教師あり学習(フィードバック・フィードフォワード)』以外にも学習理論は存在し、それらは以下の記事でまとめているので興味がある方は観覧してみてほしい。
⇒『リハビリ(理学療法・作業療法)でも活用される、様々な「学習理論」まとめ』
関連記事(+合わせて読まれやすい記事)
インナーマッスル(コアマッスル)の段階的トレーニング
徒手療法初心者の心得(メイトランド)
理学療法士の講習会(研修会・勉強会)を紹介します(モビライゼーション)